- EigenValue Decomposition
- Singular Value Decomposition
- ==Case Studies D==
- Iterative Methods For Linear Equations
- Unconstrained Optimization
- Case Studies E
This is my course note taken in Chinese.
EigenValue Decomposition
Case Study
- Page - Rank
- Spectral Clustering(重要)
- 给你一个图,你要知道怎么分割
- 要知道Laplacian
- Normalized也要知道
与Single Value Decomposition的关系
- $A=U\Sigma V^T$
- 利用$A^TA=V\Sigma U^TU\Sigma V^T=V\Sigma^2V^T$
Singular Value Decomposition
预备知识
-
SVD的形式:$A=U\Sigma V^T$
- $U\in R^{\rm mxn}, \Sigma\in R^{\rm nxn}, V\in R^{\rm nxn}$
- U和V是正交阵,$\Sigma$是对角阵,且$\sigma_1 \ge \sigma_2 \ge \cdots \ge \sigma_n \ge 0$
- matlab的svd出来的$\Sigma$矩阵就已经是排好序的了。
- 特征值分解不一定存在,但是奇艺值分解一定存在。
- 当A为对称正定矩阵的时候,特征值与奇艺值一样。
-
形式
- $AV=U\Sigma$ and $Av_i =\sigma_i u_i$
- $rank(A)=r$等价于$\sigma_r >0, \sigma_{r+1}=0,\cdots, \sigma_n=0$(可降维成r阶
-
==show==性质
- $|A|_2 = \sigma_1$
- $|A|_F=\sqrt{\sigma_1^2+\cdots+\sigma_n^2}$
- $k(A)=\frac{\sigma_1}{\sigma_n}$ 如果$\sigma_n >0$
- $k(A^TA)=(k(A))^2$
- $A^{-1}=\sum_{i=1}^n \sigma_i^{-1} u_iv_i^T$
最佳低秩逼近矩阵
-
只选择奇异值最大的r个
-
- 关于矩阵的2范数和F范数的表示的问题还需要再掌握
计算SVD
- 若A是方阵
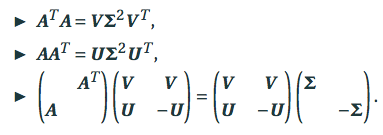
- 此时SVD可以转换成$A^TA$或者$AA^T$的特征值分解来求
- 因为$A^TA=V\Sigma^2 V^T$的形式和特征值分解的$A=T\Lambda T^T$的形式一样,利用特征值分解即可求出$\Sigma^2$和$V$,再通过A即可求U
- 若A不是方阵
- 先把A转换成B,B是上三角的二对角矩阵,才能==保证==$B^TB$是三对角对称矩阵
- 对$B^TB$ 进行QR分解
应用
- 解最小二乘法
- 问题:find $x$ such that $f(x)=|Ax-b|_2^2$ is minimized
- 转换:$A^TAx=A^Tb$
- 应用SVD:$\Sigma V^T x=U^Tb$
- 图像压缩
- 矩阵完整化
==Case Studies D==
PCA
- 内积定义:$<A,B>=\sum_{i=1}^m \sum_{j=1}^n a_{ij} b_{ij}$
- 正交投影的概念
- 步骤:
- 先计算$\bar x$和$\bar X$,$\bar X = (x_1-\bar x, \cdots, x_m - \bar x)$
- 然后计算$\bar X$的SVD分解,$\bar X= U\Sigma V^T$
- 令$Q=(u_1,\cdots,u_k)$,最大的k个奇艺值对应的k个奇艺值向量 (此处降秩到k
- 对于一个新的$x$,计算正交分解$QQ^Tx$
Iterative Methods For Linear Equations
- 前提:A is symmetric positive definite matrix (则可以用Cholesky Decomposition
- 目的:解$Ax=b$
- 经过求导转换后,解$Ax=b$相当于解$\min \frac{1}{2}x^TAx-b^Tx=\min f(x)$
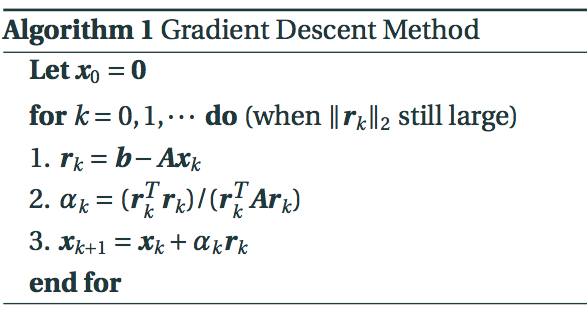
GD for Linear Equations Ax=b
-
步骤
-
记号:$r_k=-\nabla f(x_k)=b-Ax_k$
-
==证明==$\alpha_k=\frac{r_k^Tr_k}{r_k^T A r_k}=\arg \min h(\alpha),h(\alpha)=f(x_k+\alpha r_k)$
-
终止条件:$|r_k|_2$足够小
-
==证明==收敛速度
- $f(x_{k+1})-f(x_)\le\rho f(x_{k+1})-f(x_)$,其中$\rho=1-\frac{1}{k(A)}$
- 当条件数$k(A)$越大的时候,收敛速度越快
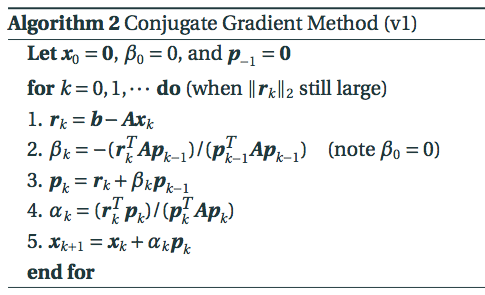
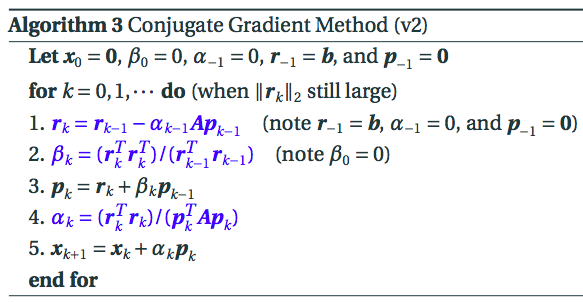
CG for Linear Equations Ax=b
-
$p_k=-\nabla f(x)+\beta_k p_{k-1}$
-
步骤
-
==正交性和共轭正交性==
- $<r_k,r_j>=0,\,\, <r_k,p_j>$ for all $j<k$
- $<p_k,Ar_j>=0,\,\, <p_k,Ap_j>$ for all $j<k$
-
$Ax=b$,需要A对称且正定
- ==问题==:for general linear equation, how to solve it using CG method? ( A is general matrix, invertible)
- $AX=b, A=M-N$,$X_{k+1}=M^{-1}NX_k+b$ ???
-
前n步之内一定可以收敛到真解(==why?==需要掌握),收敛比GD快。
- $ {r_0,r_1,\cdots}$ are always orthogonal
-
更有效率的步骤
-
preconditioning的CG不做要求,思路:condition number越小越好。
Unconstrained Optimization
预备知识
- 全局最优和局部最优的概念
梯度与求导
-
梯度的定义
-
Hessian的定义
-
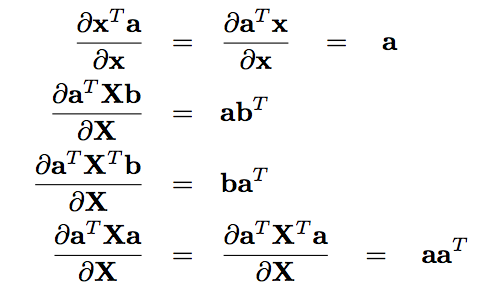
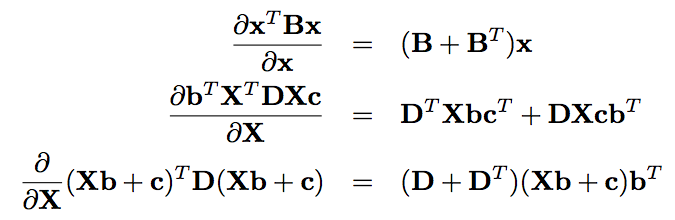
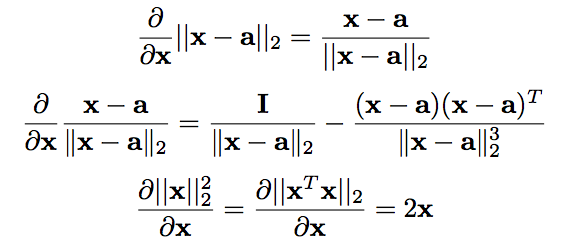
矩阵的==求导规则==
-
关于梯度和Hessian的必要和充分条件,注意一个是半正定,一个是正定。
- 如果是局部最小,则:一阶导数为0,二阶导数是==半正定==。
- 如果一阶导数为0,二阶导数是==正定==,则:局部最小。
凸函数
-
定义
-
$f(\lambda x+(1-\lambda)y)\le \lambda f(x)+(1-\lambda)f(y)$
-
强凸函数
-
$f(x)-\frac{m}{2}|x|_2^2$ is convex for some $m>0$
-
==总结==
-
f is convex if and only if f′′(x) ≥ 0 for all x.
f is strongly convex if and only if f′′(x) ≥ m > 0 for all x.
-
在问你一道题是不是convex还是strong convex的时候,做法就是先去求倒数,然后求倒数的最小值,看能不能找到m。
-
-
-
-
判断方法
- 一阶导数满足$f(y)\ge f(x)+\nabla f(x)^T(y-x)$ $\Longleftrightarrow$ 凸函数
- 二阶导数半正定 $\Longleftrightarrow$ 凸函数
-
性质
- 全局最优就是局部最优
- 证明==check this==
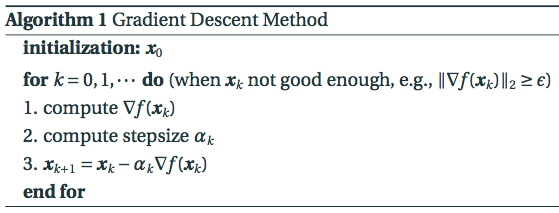
Gradient Descent
-
步骤
-
关于步长的选择
-
可以是一个fixed的值
-
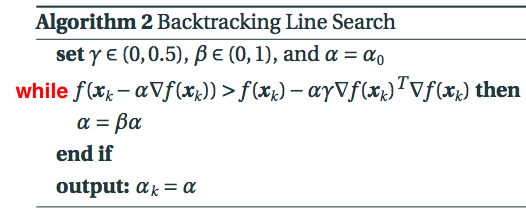
也可以是backtracking line search的方法去迭代找到那个$\alpha$
-
$\alpha_k=\arg \min _{\alpha} f(x_k -\alpha \nabla f(bx_k))$
-
算法
-
-
-
还用非常非常长的片段去证明了梯度下降的收敛性
- ==Analysis==的部分全部没看
Newton’s Method
- 前提
- f(x)为强凸函数
- 步骤
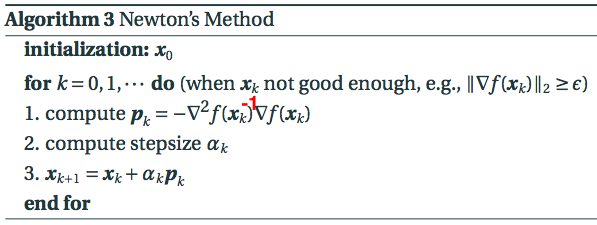
- Backtracking每次都从$\alpha=1$ 开始
- 由于p中已经包含了负号,所以在迭代x的时候用的+号
- ==例子==(期末考算法往往就是要你迭代几次
- A special example $f(x)=\frac{1}{2}x^TAx-b^Tx$. What is the iteration of Newton’s method with stepsize $\alpha_k= 1$?
- 对比
- GD只用到了一阶导数,而牛顿法用到了二阶导数
- 与GD比起来,相当于每一次都要去解一个Hessian方程,所以计算成本很高(虽然收敛更快,所以这里有一个tradeoff
- 还对于牛顿法的收敛性进行了证明
- ==Analysis==的部分全部没看
BB Method
-
目的:之前牛顿法每一次都要去解一个Hessian方程,计算成本较大,所以我们可以选取一个近似的Hessian矩阵来当成stepsize,降低计算成本。
-
缺点:用一个identity matrix来近似,虽然也有效,但是较为粗略。
BFGS
-
目的:找到一个更精确的近似Hessian矩阵的方式。
-
方法:满足两个条件,求导。
-
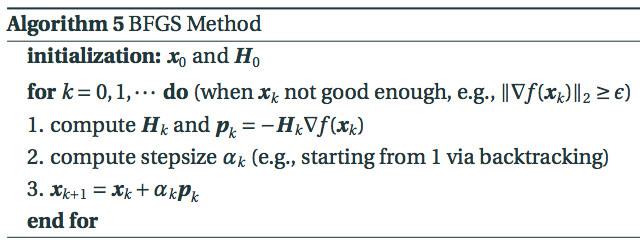
优点:$H_k$是由前一步的$H_{k-1}$更新得到的,计算比较方便。
-
步骤
-
记号
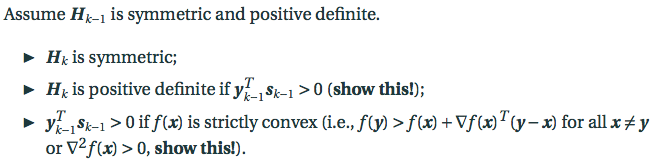
- $s_{k-1}=x_k-x_{k-1},y_{k-1}=\nabla f(x_k)-\nabla f({x_{k-1}})$

- $H_0$可以选择I
-
$H_k$的性质==证明很容易考到!==
-
-
==总结==
- 关键在于抓住迭代的通式$x_{k+1}=x_k+\alpha p_k$
- 改变步长$\alpha$
- backtracking line search
- BB stepsize
- 改变下降方向$p_k$
- GD:$p_k=-\nabla f(x_k)$
- CG:$p_k=-\nabla f(x)+\beta_k p_{k-1}$
- NM:$p_k=-\nabla^2 f(x_k)^{-1} \nabla f(x_k)$
- BFGS:$p_k=-H \nabla f(x_k)$
Case Studies E
K-means
-
背景:n个数据点${X_i}{i=1}^n$,k个聚类中心${c_j}{j=1}^k$
-
目标:$E(c)=minJ(c,\gamma)=\sum_{j=1}^k\gamma_{ij}\parallel x_i-c_j\parallel_2^2$
- 如果$x_i$属于类j,则$r_{ij}=1$,否则$r_{ij}=0$
- $\sum_{j=1}^k \gamma_{ij}=1$,即每一个数据点属于且仅属于某一类
-
问题:找到如此定义的$E(c)$的全局最优是NP-hard的。
-
解决:Lloyd’s Algorithm
-
将$x_i$分给离它最近的那个聚类中心$c_j$
- 即:$r_{ij}=1$如果$c_j$是离$x_i$最近的,否则为1
-
确定好了$r_{ij}$之后再重新计算聚类中心(该中心为属于该类的所有点的平均点
- $c_j=\frac{1}{n_j}\sum_{r_{ij}=1}x_i$
- ==这里注意证明== $c_j=\arg \min_\mu \sum_{r_{ij}=1}\parallel x_i-\mu\parallel_2^2$
-
此时对于重新分类后的聚类中心有
-
-
收敛性证明
-
因为$c_j’=\frac{1}{n_j}\sum_{r_{ij}=1}x_i$
-
所以存在$ \sum_{\gamma_{ij}=1}\parallel x_i-c_j’\parallel^2 \le \sum_{\gamma_{ij}=1}\parallel x_i-c_j\parallel^2$
-
对于$c’$决定的$r_{ij}’$则成立
-
可见,$E(c)$的确是在随着迭代减小的。
-
-
问题:容易因为cluster center选择的不同而陷入不同的最优值,因为non-convex
QR Algorithm on a Tridiagonal Matrix
- 用Householder transformation将A转换成三对角矩阵
- $A=QR, \bar A=RQ$,若A为三对角,证明$\bar A$也应该为三对角
QR Decomposition
- Q orthogonal matrix proof: $I-2QQ^T$ also orthogonal
- 三种QR的算法需要掌握
- 可以出很多套定义的问题,但前提是你要明白定义啊
- 与Cholesky decomposition 联系起来出题
- Householder transformation 也有很多可以考的东西
LU Decomposition
- 作用:方便解线性方程
- Gaussian Elimination转换成U/L
- 如何compute LU
- 不是所有的矩阵都有LU,需要用pivoting
- 不涉及Case Study
Basic Operations of Matrix
其他
- 算法的考法就是让大家写几步推导
- 高老师讲的部分不考
- show、why之类的ppt上的地方要重要,然后讲过的题目也非常重要!
- 不能用计算器